¶ LD19 Lidar
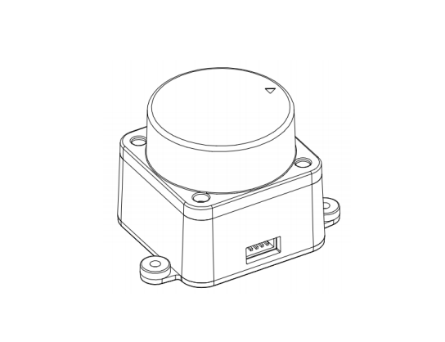
LD19 主要由激光测距核心,无线传电单元,无线通讯单元,角度测量单元、电机驱动单 元和机械外壳组成。
¶ 原理和系统简介
LD19 测距核心采用 DTOF 技术,可进行每秒 4500 次的测距。每次测距时,LD19 朝前发 射出红外激光,激光遇到目标物体后被反射到单光子接收单元。由此,我们获取到了激光的发出时间和单光子接收单元收到激光的时间,两者的时间差即光的飞行时间,飞行时间再结合光速即可解算出距离。
获取到距离数据后,LD19 会融合角度测量单元测量到的角度值组成点云数据,然后通过 无线通讯将点云数据发送到外部接口。同时外部接口提供 PWM,使电机驱动单元驱动电机。 外部控制单元获取到转速后,通过 PID 算法闭环控制到指定的转速,从而使 LD19 稳定工作。
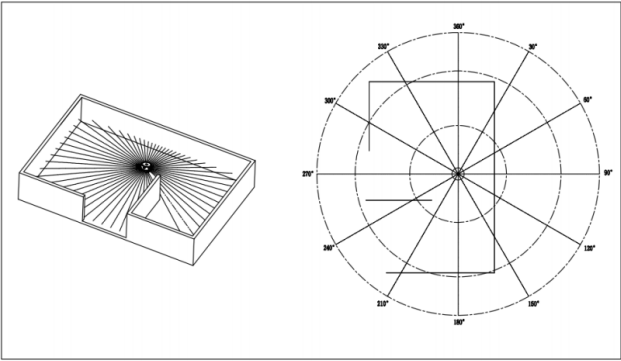
LD19 点云数据形成的环境扫描图意图如下:
¶ 数据接口
¶ 通讯与接口
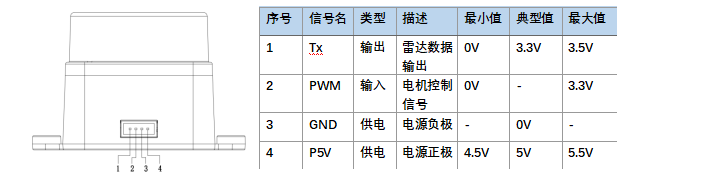
LD19 使用 ZH1.5T-4P 1.5mm 连接器与外部系统连接,实现供电和数据接收,具体接口定义和参数要求见下图/表 :
LD19 具有可无级调速的电机驱动器,支持内部控速和外部控速。在 PWM 引脚不接或者接 入高阻信号时,默认为内部调速,默认转速为 10Hz。外部控速需要在 PWM 引脚接入方波信 号,可通过 PWM 信号占空比控制电机的启、停和转速。由于每个产品电机的个体差异,占空 比设置为典型值时实际转速可能会有差异,如要精确控制电机转速,需根据接收数据中的转速 信息进行闭环控制。
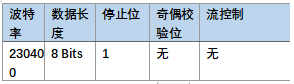
LD19 的数据通讯采用标准异步串口(UART)单向发送,其传输参数如下表所示:
¶ 坐标系定义
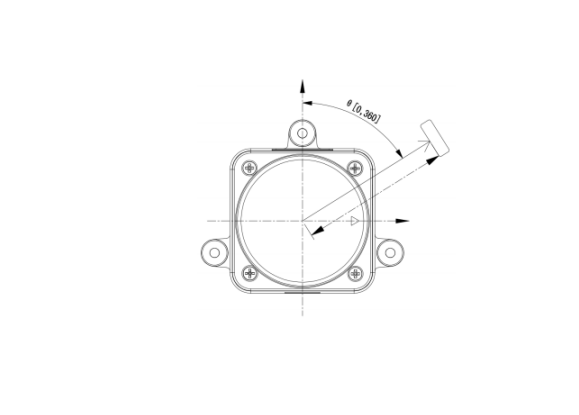
LD19 常用遵循左手法则的坐标体系,传感器的正前方定义位坐标系的 X 轴(即 0 角度位置),坐标系原点为测距单元的旋转中心,旋转角度沿着顺时针方向旋转增大,如下图所示:
¶ 光学窗口与机械尺寸
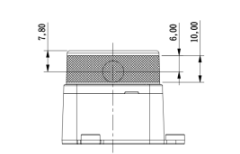
LD19 的测距单元中的激光发射与接收,需要一个光学窗口,在结构上需要露出。外部系 统对该窗口的部分遮挡,将在一定程度上影响 LD19 的测距性能。下图为光学窗口尺寸(单位mm)
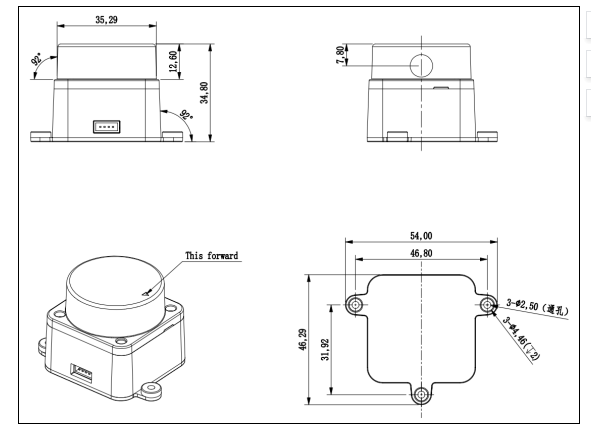
其他安装尺寸见下图, 公差为±0.2(单位: mm)
¶ 安全与使用范围
 LD19 采用低功率的红外激光器作为发射光源,因而可以确保对人类及宠物的安全,目前本产品已测试通过 Class I 级别的激光器安全标准。
LD19 采用低功率的红外激光器作为发射光源,因而可以确保对人类及宠物的安全,目前本产品已测试通过 Class I 级别的激光器安全标准。
LD19 符合 21 CFR 1040.10 和1040.11,但 2007 年 6 月 24 日激光通告第 50 号的偏差除外。
注意:自行调整或改装本产品可能会导致危险的辐射暴露。
¶ 规格参数
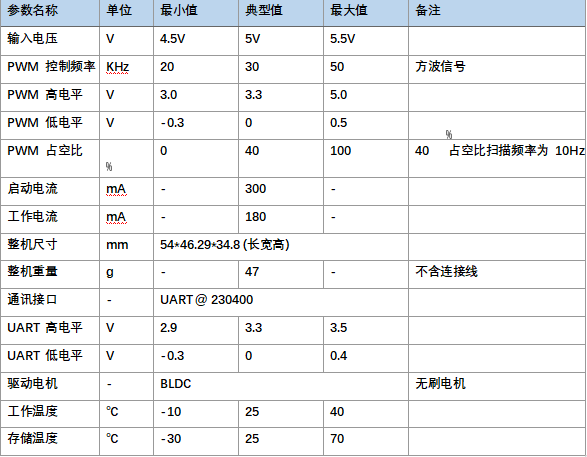
¶ 电气与机械参数
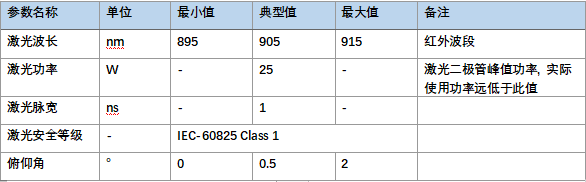
¶ 光学参数
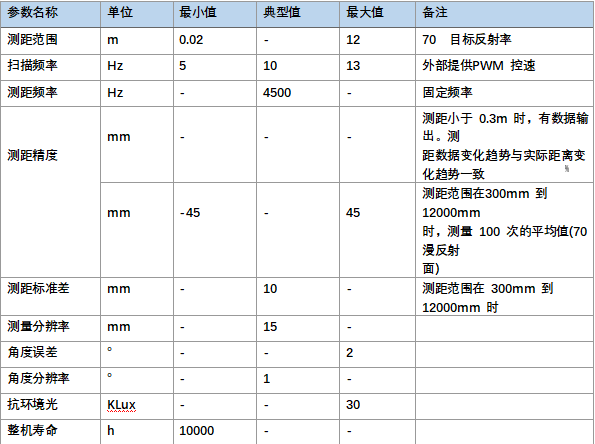
¶ 性能参数
¶ 开发资料
¶ SDK
Linux:链接:https://pan.baidu.com/s/1ctsNCiCpQr5rsvb0zWGwbw?pwd=72g5 提取码:72g5
ROS:链接:https://pan.baidu.com/s/1djgBWoazG2lvW0bWxT-byQ?pwd=v11f 提取码:v11f
ROS2:链接:https://pan.baidu.com/s/1VYG-PNfAavQy7xm2dT2eLA?pwd=bnic 提取码:bnic
¶ 开发手册
开发手册:链接:https://pan.baidu.com/s/1VzFafh_76KLrf9cKmdvvLQ?pwd=eb2w
提取码:eb2w
¶ 购买链接
淘宝:https://item.taobao.com/item.htm?id=673629832739
天猫:https://detail.tmall.com/item.htm?id=691814852297
京东:https://i-item.jd.com/10060506959634.html